Efficient deep learning operators are at the core of deep learning systems. Usually these operators are hard to optimize and require great efforts of HPC experts. TVM, an end to end tensor IR/DSL stack, makes this much easier.
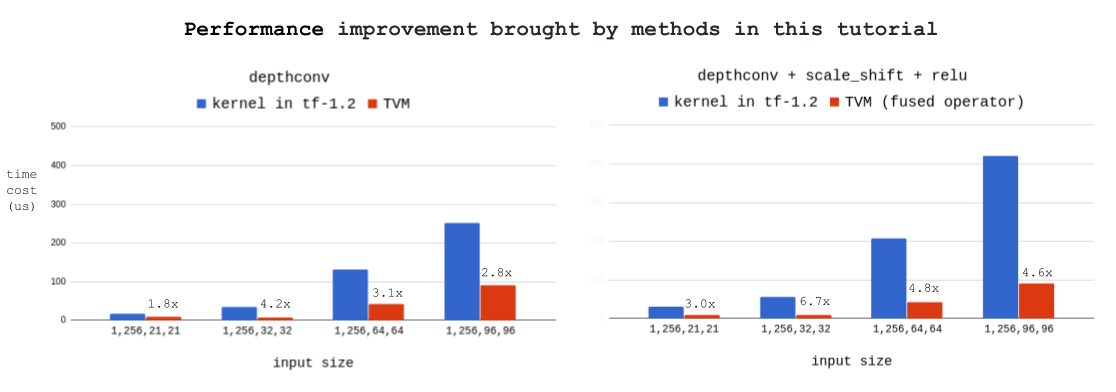
This blog teaches you how to write high-performance GPU operator kernels with the help of TVM. We use depthwise convolution (i.e. topi.nn.depthwise_conv2d_nchw) as an example, and demonstrate how we can improve over the already hand optimized CUDA kernel in tensorflow. Our final version is 2x-4x faster than the optimized kernel in tf-1.2 under different workloads, and 3x-7x faster with operator fusion enabled. Below is the result tested on GTX1080, with filter size = [1, 256, 3, 3], stride = [1, 1], padding = ‘SAME’:
Introduction to Depthwise Convolution
Depthwise convolution is an important building block of modern architectures, such as Xception [1] and MobileNet [2]. It’s an effective method to reduce the computation complexity of deep neural networks.
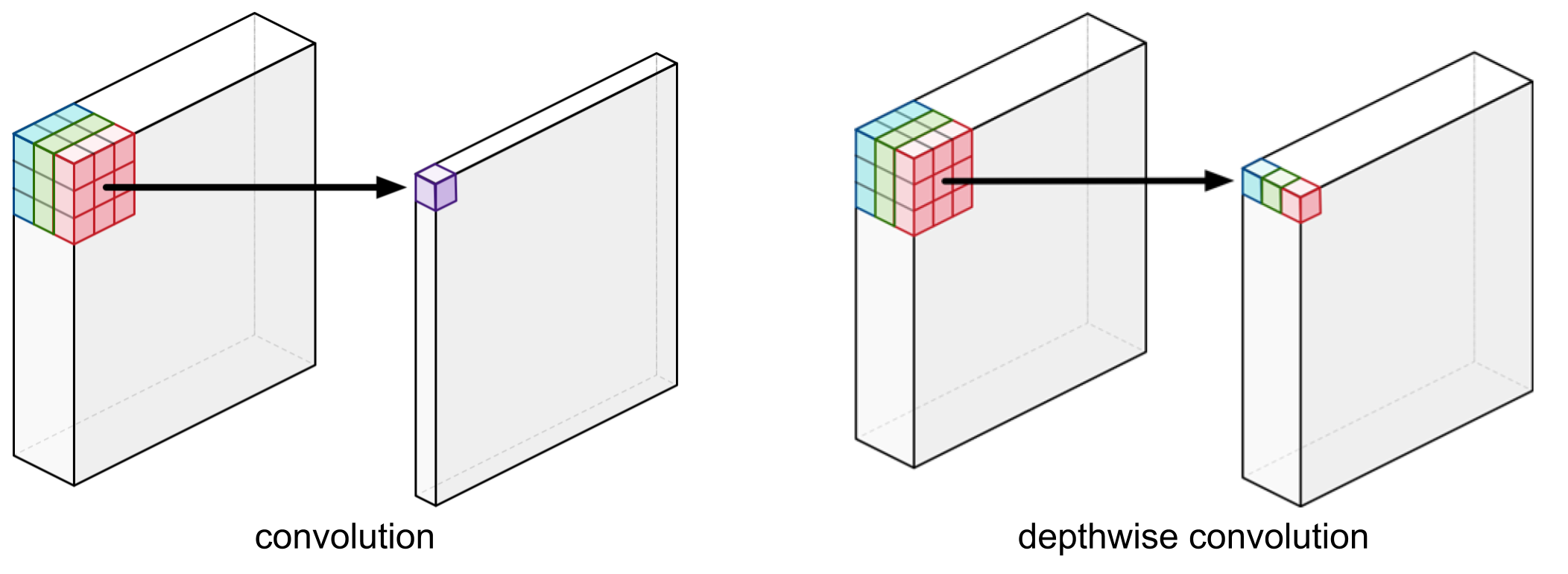
source: http://machinethink.net/blog/googles-mobile-net-architecture-on-iphone/
In TVM, depthwise convolution can be declared as:
# padding stage
PaddedInput = tvm.compute(
(batch, in_channel, height_after_pad, width_after_pad),
lambda b, c, i, j: tvm.select(
tvm.all(i >= pad_top, i - pad_top < in_height, j >= pad_left, j - pad_left < in_width),
Input[b, c, i - pad_top, j - pad_left], tvm.const(0.0)),
name="PaddedInput")
# depthconv stage
di = tvm.reduce_axis((0, filter_height), name='di')
dj = tvm.reduce_axis((0, filter_width), name='dj')
Output = tvm.compute(
(batch, out_channel, out_height, out_width),
lambda b, c, i, j: tvm.sum(
PaddedInput[b, c/channel_multiplier, i*stride_h + di, j*stride_w + dj] * Filter[c/channel_multiplier, c%channel_multiplier, di, dj],
axis=[di, dj]),
name='DepthwiseConv2d')
General GPU Optimization Guidelines
This part briefly talks about three concepts we should know when optimizing CUDA code: data reuse, shared memory and bank conflicts. It would be great if you already know them, then you may skip this part.
Data Reuse
In modern computing architectures, the cost of loading data from memory is much higher than doing a single floating point computation [3]. Because of that, we always want to reuse the input data after they are loaded into registers or shared memory (cache).
There are two forms of data reuse in depthwise convolution: filter reuse and input reuse. Filter reuse happens as the filter slides over the input channel and computes multiple times. Input reuse is realized through tiling, let’s take 3x3 depthwise conv as an example:
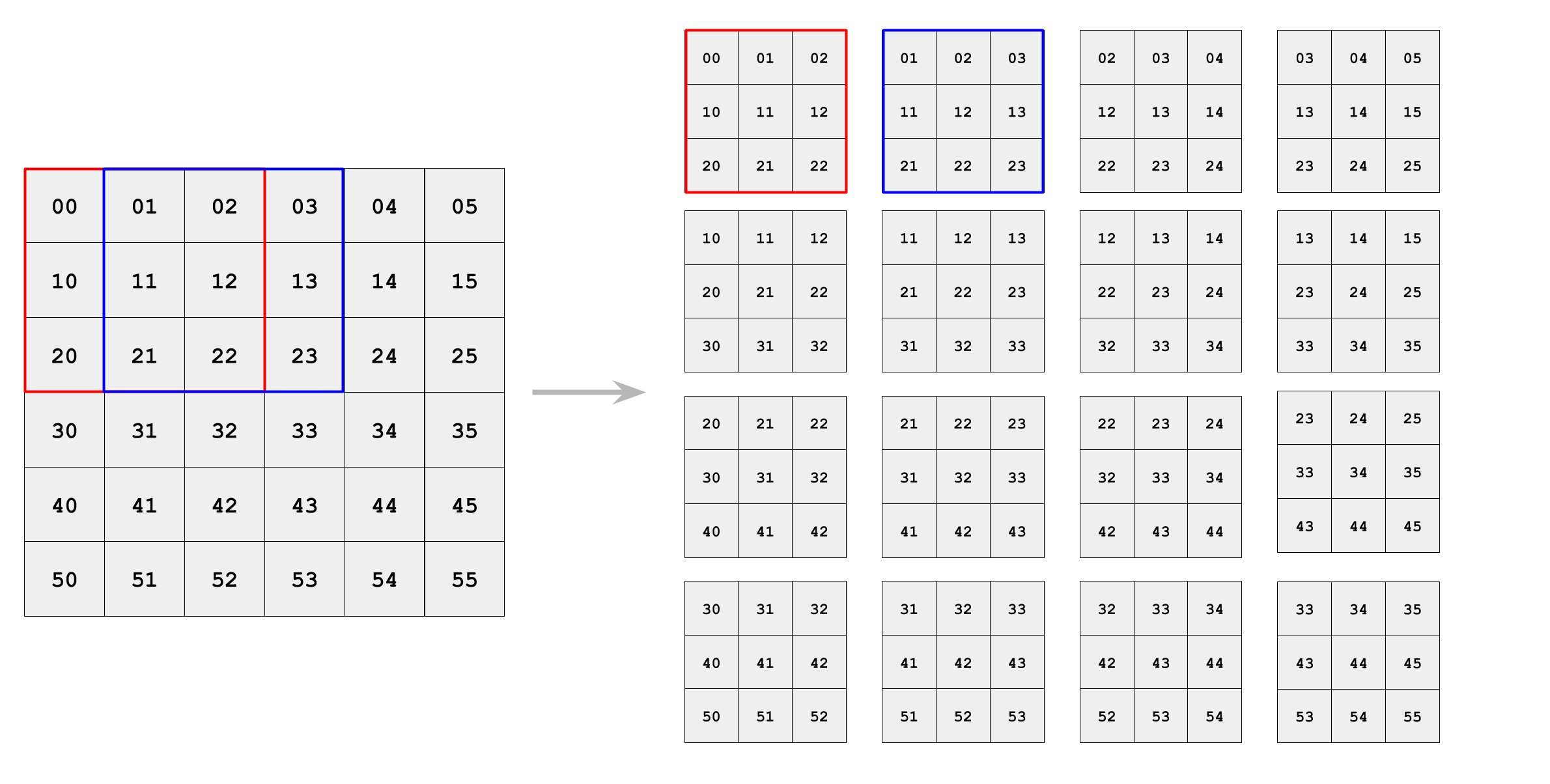
Without tiling, each thread computes 1 output element and loads 3x3 input data. 16 threads together have 9x16 loads.
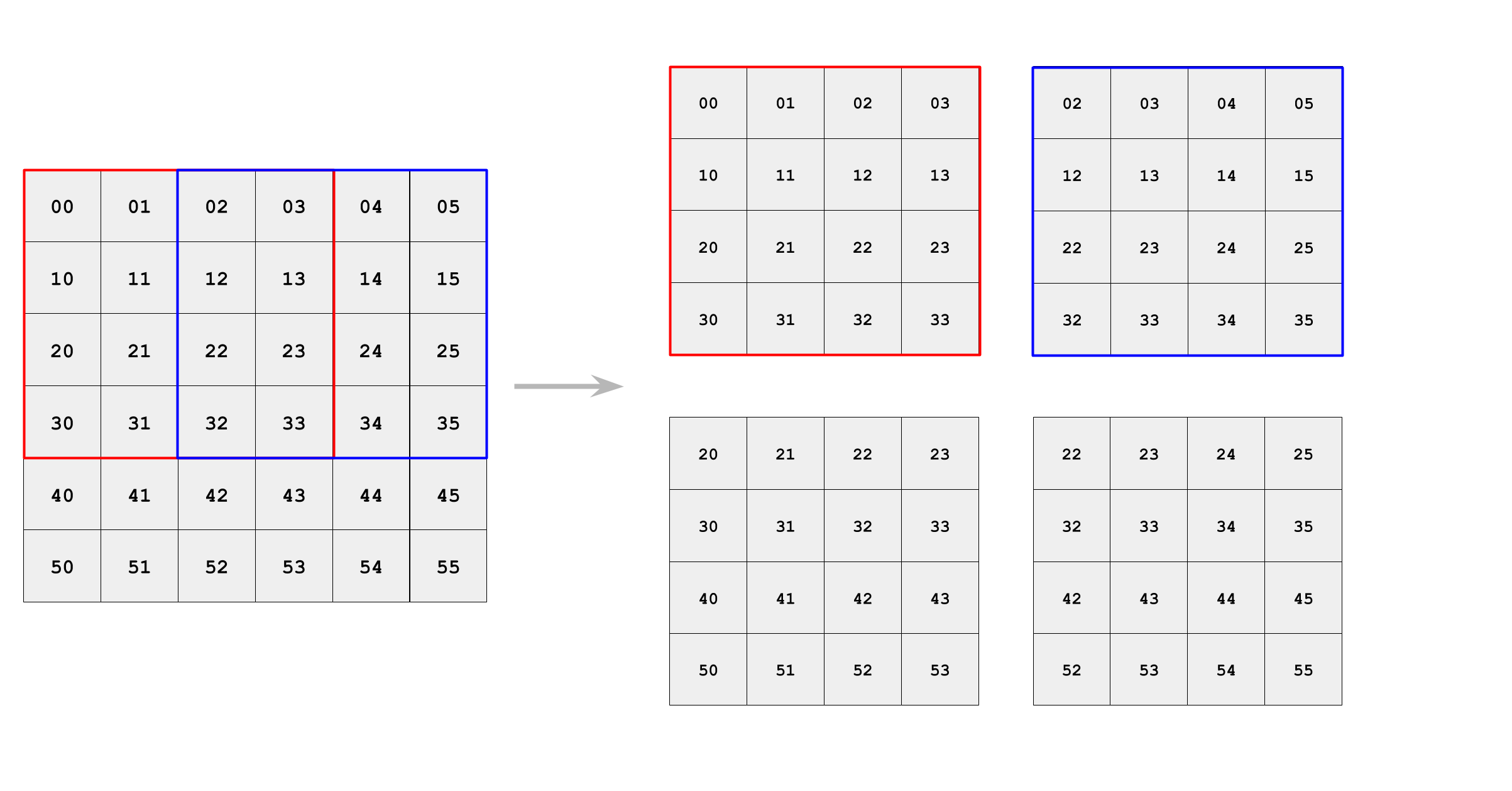
With tiling, each thread computes 2x2 output elements and loads 4x4 input data. 4 threads together have 16x4 loads.
Shared Memory and Bank Conflicts
Shared memory can be seen as cache in GPU. It is on-chip and much faster than global memory.
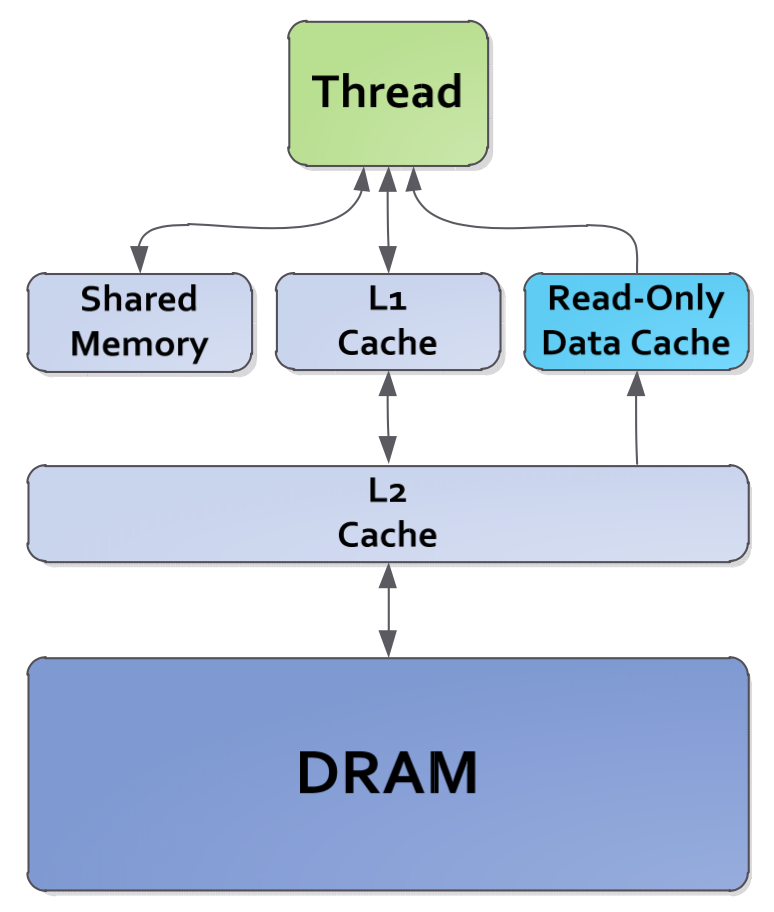
Shared memory is allocated per block. It’s common practice to load data from global memory into shared memory, and then all threads in the block read data from shared memory.
The size of shared memory is limited (usually 48K), so we must be cautious of shared memory overflow. Besides, too much shared memory allocated to one block limits the number of active blocks per multiprocessor.
Another performance issue with shared memory is bank conflicts. Shared memory is divided into equally sized memory modules (banks) that can be accessed simultaneously, however, if multiple threads access the same memory bank (causing bank conflicts), the accesses will be serialized, thus decreasing the effective bandwidth.
Shared memory banks are organized such that successive addresses are assigned to successive banks. To avoid bank conflicts, it’s better that successive threads access successive memory addresses, as illustrated below (each color represents one shared memory bank):
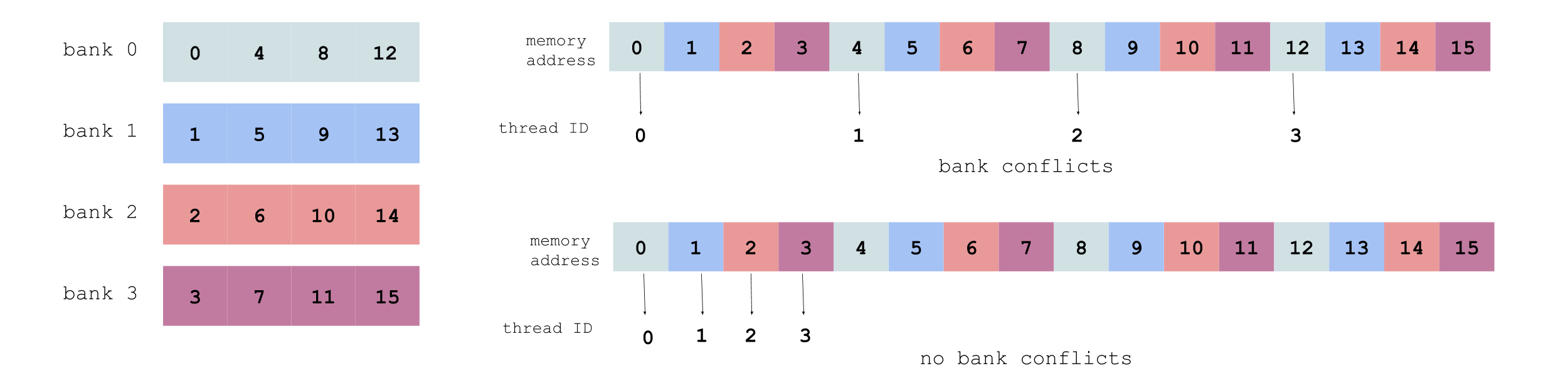
For more details on shared memory and bank conflicts, please refer to this Nvidia’s blog.
Ok, now let’s start optimizing depthwise convolution in TVM.
Schedule Optimization
Compute PaddedInput Inline to Save Memory Allocation
As we see from part 1, padding is declared explicitly as a separate stage. We compute it inline to avoid redundant memory allocation:
s = tvm.create_schedule(Output.op)
s[PaddedInput].compute_inline()
Divide One Large Channel into Smaller Blocks
One straightforward schedule for depthwise convolution is that one cuda block takes care of one input channel and corresponding filters, loading them into shared memory and then computing:
IS = s.cache_read(PaddedInput, "shared", [DepthwiseConv2d])
FS = s.cache_read(Filter, "shared", [DepthwiseConv2d])
block_y = tvm.thread_axis("blockIdx.y")
block_x = tvm.thread_axis("blockIdx.x")
# bind the dimension of batch (N in NCHW) with block_y
s[Output].bind(Output.op.axis[0], block_y)
# bind the dimension of channel (C in NCHW) with block_x
s[Output].bind(Output.op.axis[1], block_x)
We test the average time cost of 1000 runs on GTX 1080, and compare with depthwise_conv2d in tensorflow. Here is the result:
| Input | Filter | stride | tf-1.2 SAME pad (us) | TVM SAME pad (us) |
|---|---|---|---|---|
| [1, 256, 21, 21] | [256, 1, 3, 3] | [1, 1] | 16.1 | 9.1 |
| [1, 256, 32, 32] | [256, 1, 3, 3] | [1, 1] | 34.8 | 14.5 |
| [1, 256, 64, 64] | [256, 1, 3, 3] | [1, 1] | 130.9 | 98.9 |
| [1, 256, 96, 96] | [256, 1, 3, 3] | [1, 1] | 251.6 | 387.4 |
As we can see, this schedule performs well with small channel size like 21 x 21 or 32 x 32, however, its performance drops seriously as the channel size increases to larger than 64 x 64. One main reason is that too much shared memory allocated to one block limits the number of active blocks per multiprocessor.
We modify the schedule to divide one large channel into smaller blocks. For example, one channel (64 x 64 or 96 x 96) is divided into blocks of 32 x 32, and one cuda block takes care of one 32 x 32 block:
blocking_h = 32
blocking_w = 32
# split the dimension of height (H in NCHW)
bx1, _ = s[Output].split(Output.op.axis[2], factor=blocking_h)
# split the dimension of width (W in NCHW)
bx2, _ = s[Output].split(Output.op.axis[3], factor=blocking_w)
# assign one 32 x 32 block to one cuda block
by = s[Output].fuse(Output.op.axis[0], Output.op.axis[1])
s[Output].bind(by, block_y)
bx = s[Output].fuse(bx1, bx2)
s[Output].bind(bx, block_x)
Here is the new result:
| Input | [blocking_h, blocking_w] | tf-1.2 SAME pad (us) | TVM SAME pad (us) |
|---|---|---|---|
| [1, 256, 64, 64] | [32, 32] | 130.9 | 63.4 |
| [1, 256, 96, 96] | [32, 32] | 251.6 | 132.5 |
Our blocking strategy works! For 64 x 64 channel size, it brings 1.6x acceleration (98.9us -> 63.4us); for 96 x 96 channel size, it brings 2.9x acceleration (387.4us -> 132.5us).
Tuning Parameters of Thread Numbers
How to schedule the workload, say, 32x32 among the threads of one cuda block? Intuitively, it should be like this:
num_thread_y = 8
num_thread_x = 8
thread_y = tvm.thread_axis((0, num_thread_y), "threadIdx.y")
thread_x = tvm.thread_axis((0, num_thread_x), "threadIdx.x")
ty, yi = s[Output].split(h_dim, nparts=num_thread_y)
tx, xi = s[Output].split(w_dim, nparts=num_thread_x)
s[Output].reorder(ty, tx, yi, xi)
s[Output].bind(ty, thread_y)
s[Output].bind(tx, thread_x)
There are two parameters in the schedule: num_thread_y and num_thread_x. How to determine the optimal combination of them?
Well, let’s first do some experiments. Below is the result with Filter = [256, 1, 3, 3] and stride = [1, 1]:
| Case | Input | num_thread_y | num_thread_x | TVM SAME pad (us) |
|---|---|---|---|---|
| 1 | [1, 256, 32, 32] | 8 | 32 | 9.7 |
| 2 | [1, 256, 32, 32] | 4 | 32 | 8.8 |
| 3 | [1, 256, 32, 32] | 1 | 32 | 17.7 |
| 4 | [1, 256, 32, 32] | 32 | 1 | 32.5 |
Many interesting observations from above results:
-
Case 2 is faster than case 1. In case 2, each thread computes a 8x1 tile in output, which corresponds to a 10x3 tile in input. It has better data reuse than case 1’s 4x1 tile.
-
Case 3 is slower than case 2. It’s because in case 3, the workload per thread is too large and leads to much cost of local memory read.
-
Case 4 is slower than case 3. It’s because
num_thread_x = 32ensures no bank conflicts, whilenum_thread_y = 32doesn’t.
To summarize what we learn from above observations:
- Large tile is good for data reuse, but not good for local memory read.
- The influence of
num_thread_yandnum_thread_xon bank conflicts is asymmetric. - To find the optimal combination of
num_thread_yandnum_thread_xis to achieve a balance of efficient shared memory access (avoid bank conflicts), data reuse, and local memory read.
Pretty tricky. So, what exactly should we do to find the optimal combination? The answer is brute force search.
We can pass num_thread_y and num_thread_x as arguments to the schedule function, and try all possible combinations to find the optimal one. This can be done easily in TVM:
def schedule_depthwise_conv2d(..., num_thread_y=8, num_thread_x=8):
num_thread_y = num_thread_y
num_thread_x = num_thread_x
do_schedule_as_usual
return schedule
min_time_cost = inf
for num_thread_y, num_thread_x in all_possible_combinations:
schedule = schedule_depthwise_conv2d(..., num_thread_y=num_thread_y, num_thread_x=num_thread_x)
time_cost = test_depthwise_conv2d(..., schedule)
if time_cost < min_time_cost:
min_time_cost = time_cost
optimal_combination = [num_thread_y, num_thread_x]
In fact, it can be seen as a simple auto scheduler.
Vthread and Strided Patterns
Vthread (virtual thread) in TVM is introduced to support strided patterns. We can use it this way:
num_vthread_y = 2
num_vthread_x = 2
num_thread_y = 8
num_thread_x = 8
thread_vy = tvm.thread_axis((0, num_vthread_y), "vthread", name="vy")
thread_vx = tvm.thread_axis((0, num_vthread_x), "vthread", name="vx")
thread_y = tvm.thread_axis((0, num_thread_y), "threadIdx.y")
thread_x = tvm.thread_axis((0, num_thread_x), "threadIdx.x")
# split the dimension of height (H in NCHW) twice
tvy, vyi = s[Output].split(h_dim, nparts=num_vthread_y)
ty, yi = s[Output].split(vyi, nparts=num_thread_y)
# split the dimension of width (W in NCHW) twice
tvx, vxi = s[Output].split(w_dim, nparts=num_vthread_x)
tx, xi = s[Output].split(vxi, nparts=num_thread_x)
# bind thread and vthread respectively
s[Output].bind(tvy, thread_vy)
s[Output].bind(tvx, thread_vx)
s[Output].bind(ty, thread_y)
s[Output].bind(tx, thread_x)
s[Output].reorder(tvy, tvx, ty, tx, yi, xi)
Let’s print the IR to see what vthread does:
/* Input = [1, 1, 32, 32], Filter = [1, 1, 3, 3], stride = [1, 1], padding = 'SAME' */
produce DepthwiseConv2d {
// attr [iter_var(blockIdx.y, , blockIdx.y)] thread_extent = 1
// attr [iter_var(blockIdx.x, , blockIdx.x)] thread_extent = 1
// attr [iter_var(threadIdx.y, Range(min=0, extent=8), threadIdx.y)] thread_extent = 8
// attr [iter_var(threadIdx.x, Range(min=0, extent=8), threadIdx.x)] thread_extent = 8
for (i.inner.inner.inner, 0, 2) {
for (j.inner.inner.inner, 0, 2) {
DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] = 0.000000f
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 512)] = 0.000000f
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 16)] = 0.000000f
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 528)] = 0.000000f
for (di, 0, 3) {
for (dj, 0, 3) {
DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] = (DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] + (tvm_if_then_else(((((((1 - di) - i.inner.inner.inner) <= (((blockIdx.x*16) + threadIdx.y)*2)) && ((((blockIdx.x*16) + threadIdx.y)*2) < ((33 - di) - i.inner.inner.inner))) && (((1 - dj) - j.inner.inner.inner) <= (threadIdx.x*2))) && ((threadIdx.x*2) < ((33 - dj) - j.inner.inner.inner))), Input[(((((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + (di*32)) + dj) + -33)], 0.000000f)*Filter[((di*3) + dj)]))
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 512)] = (DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 512)] + (tvm_if_then_else(((((((-15 - di) - i.inner.inner.inner) <= (((blockIdx.x*16) + threadIdx.y)*2)) && ((((blockIdx.x*16) + threadIdx.y)*2) < ((17 - di) - i.inner.inner.inner))) && (((1 - dj) - j.inner.inner.inner) <= (threadIdx.x*2))) && ((threadIdx.x*2) < ((33 - dj) - j.inner.inner.inner))), Input[(((((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + (di*32)) + dj) + 479)], 0.000000f)*Filter[((di*3) + dj)]))
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 16)] = (DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 16)] + (tvm_if_then_else(((((((1 - di) - i.inner.inner.inner) <= (((blockIdx.x*16) + threadIdx.y)*2)) && ((((blockIdx.x*16) + threadIdx.y)*2) < ((33 - di) - i.inner.inner.inner))) && (((-15 - dj) - j.inner.inner.inner) <= (threadIdx.x*2))) && ((threadIdx.x*2) < ((17 - dj) - j.inner.inner.inner))), Input[(((((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + (di*32)) + dj) + -17)], 0.000000f)*Filter[((di*3) + dj)]))
DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 528)] = (DepthwiseConv2d[(((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + 528)] + (tvm_if_then_else(((((((-15 - di) - i.inner.inner.inner) <= (((blockIdx.x*16) + threadIdx.y)*2)) && ((((blockIdx.x*16) + threadIdx.y)*2) < ((17 - di) - i.inner.inner.inner))) && (((-15 - dj) - j.inner.inner.inner) <= (threadIdx.x*2))) && ((threadIdx.x*2) < ((17 - dj) - j.inner.inner.inner))), Input[(((((((((((blockIdx.y + blockIdx.x)*16) + threadIdx.y)*32) + threadIdx.x)*2) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + (di*32)) + dj) + 495)], 0.000000f)*Filter[((di*3) + dj)]))
}
}
}
}
}
Without vthread (just set to 1), the IR is:
/* Input = [1, 1, 32, 32], Filter = [1, 1, 3, 3], stride = [1, 1], padding = 'SAME' */
produce DepthwiseConv2d {
// attr [iter_var(blockIdx.y, , blockIdx.y)] thread_extent = 1
// attr [iter_var(blockIdx.x, , blockIdx.x)] thread_extent = 1
// attr [iter_var(threadIdx.y, Range(min=0, extent=8), threadIdx.y)] thread_extent = 8
// attr [iter_var(threadIdx.x, Range(min=0, extent=8), threadIdx.x)] thread_extent = 8
for (i.inner.inner.inner, 0, 4) {
for (j.inner.inner.inner, 0, 4) {
DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] = 0.000000f
for (di, 0, 3) {
for (dj, 0, 3) {
DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] = (DepthwiseConv2d[((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i.inner.inner.inner*32)) + j.inner.inner.inner)] + (tvm_if_then_else(((((((1 - di) - i.inner.inner.inner) <= (((blockIdx.x*8) + threadIdx.y)*4)) && ((((blockIdx.x*8) + threadIdx.y)*4) < ((33 - di) - i.inner.inner.inner))) && (((1 - dj) - j.inner.inner.inner) <= (threadIdx.x*4))) && ((threadIdx.x*4) < ((33 - dj) - j.inner.inner.inner))), Input[(((((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i.inner.inner.inner*32)) + j.inner.inner.inner) + (di*32)) + dj) + -33)], 0.000000f)*Filter[((di*3) + dj)]))
}
}
}
}
}
As we can see, when num_vthread_y = 2 and num_vthread_x = 2, the 32 x 32 channel is divided into four sub-channels of 16 x 16.
Each thread computes four output elements at a time, one element in one sub-channel.
Below is the result with Filter = [256, 1, 3, 3], stride = [1, 1], blocking_h = 32, blocking_w = 32:
| Case | Input | num_thread_y, num_thread_x | num_vthread_y, num_vthread_x | TVM SAME pad (us) |
|---|---|---|---|---|
| 1 | [1, 256, 96, 96] | 8, 8 | 1, 1 | 132.5 |
| 2 | [1, 256, 96, 96] | 8, 8 | 1, 4 | 103.1 |
| 3 | [1, 256, 96, 96] | 4, 32 | 1, 1 | 95.9 |
| 4 | [1, 256, 96, 96] | 8, 16 | 1, 2 | 90.9 |
Case 2 is faster than case 1. It’s because in case 2 num_thread_x=8 and num_vthread_x=4 together ensures that consecutive threads access consecutive memory addresses,
thus avoiding bank conflicts, as illustrated below (each color represents one thread’s workload):
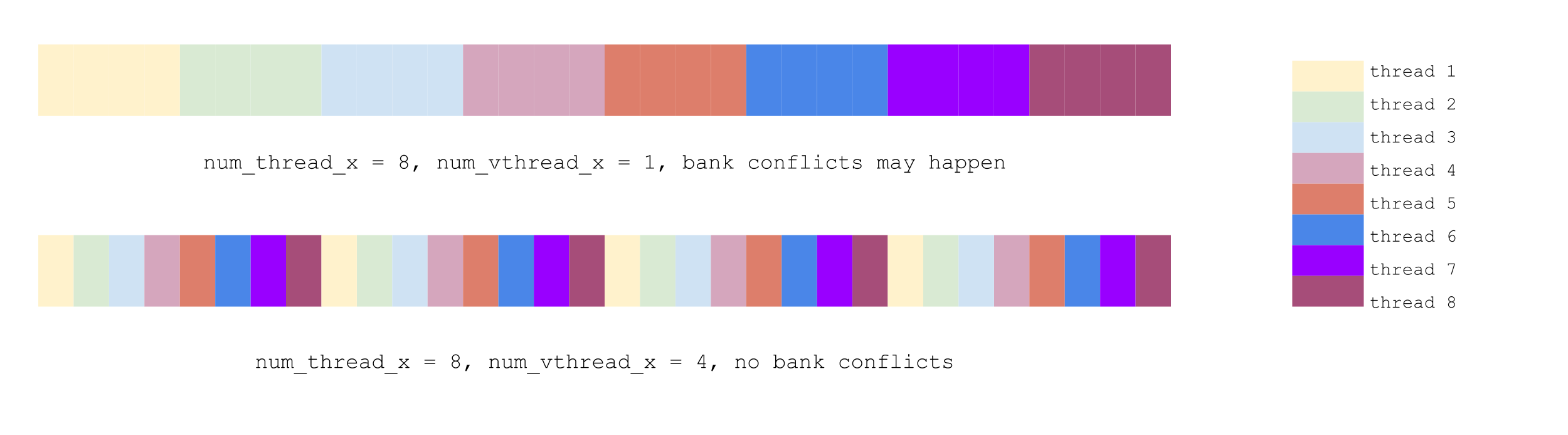
In theory case 3 and 4 should be the same fast, since they have the same workload per thread, and both enjoy efficient shared memory access. Somehow case 4 is just a little faster.
Still remember tensorflow’s speed? It’s 251.6us, and now TVM is 2.8x faster. 387.4 -> 132.5 -> 95.9 -> 90.9, blocking helps the most; tuning thread numbers saves 37us; vthread saves additional 5us.
In fact, TVM can be extremely faster than tensorflow with large kernel size or channel_multiplier (because of more filter reuse) :
| Input | Filter | stride | tf-1.2 SAME pad (us) | TVM SAME pad (us) | How faster is TVM |
|---|---|---|---|---|---|
| [1, 256, 96, 96] | [256, 1, 3, 3] | [1, 1] | 251.6 | 90.9 | 2.8x |
| [1, 256, 96, 96] | [256, 1, 5, 5] | [1, 1] | 597.6 | 128.9 | 4.6x |
| [1, 256, 96, 96] | [256, 2, 3, 3] | [1, 1] | 659.9 | 143.7 | 4.6x |
| [1, 256, 96, 96] | [256, 2, 5, 5] | [1, 1] | 1203.9 | 170.5 | 7.1x |
Operator Fusion
One typical optimization we can do in deep learning is operator fusion, that computes multiple operators together in a single kernel without saving intermediate results back to global memory. TVM supports that out of the box.
Consider a common pattern in neural networks: depthwise_conv2d + scale_shift + relu. We can fuse the three operators into one, by slightly modifying the original schedule:
DepthwiseConv2d = topi.nn.depthwise_conv2d(Input, Filter, stride, padding)
ScaleShift = topi.nn.scale_shift(DepthwiseConv2d, Scale, Shift)
Relu = topi.nn.relu(ScaleShift)
Output = Relu # is no longer DepthwiseConv2d
s[ScaleShift].compute_inline() # this line fuses ScaleShift, explicitly
s[DepthwiseConv2d].set_scope("local") # this line fuses DepthwiseConv2d, implicitly
schedule(Output) # schedule for Output the same way we schedule for DepthwiseConv2d as discussed above
s[DepthwiseConv2d].compute_at(s[Output], tx) # tx is the inner most axis, bound to threadIdx.x
It generates IR like this:
/* Input = [1, 1, 32, 32], Filter = [1, 1, 3, 3], stride = [1, 1], padding = 'SAME' */
produce Relu {
// attr [iter_var(blockIdx.y, , blockIdx.y)] thread_extent = 1
// attr [DepthwiseConv2d] storage_scope = "local"
allocate DepthwiseConv2d[float32 * 1 * 1 * 4 * 4]
// attr [iter_var(blockIdx.x, , blockIdx.x)] thread_extent = 1
// attr [iter_var(threadIdx.y, Range(min=0, extent=8), threadIdx.y)] thread_extent = 8
// attr [iter_var(threadIdx.x, Range(min=0, extent=8), threadIdx.x)] thread_extent = 8
produce DepthwiseConv2d {
for (i, 0, 4) {
for (j, 0, 4) {
DepthwiseConv2d[((i*4) + j)] = 0.000000f
for (di, 0, 3) {
for (dj, 0, 3) {
DepthwiseConv2d[((i*4) + j)] = (DepthwiseConv2d[((i*4) + j)] + (tvm_if_then_else(((((((1 - di) - i) <= (((blockIdx.x*8) + threadIdx.y)*4)) && ((((blockIdx.x*8) + threadIdx.y)*4) < ((33 - di) - i))) && (((1 - dj) - j) <= (threadIdx.x*4))) && ((threadIdx.x*4) < ((33 - dj) - j))), Input[(((((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i*32)) + j) + (di*32)) + dj) + -33)], 0.000000f)*Filter[((di*3) + dj)]))
}
}
}
}
}
for (i2.inner.inner.inner, 0, 4) {
for (i3.inner.inner.inner, 0, 4) {
Relu[((((((((blockIdx.y + blockIdx.x)*8) + threadIdx.y)*32) + threadIdx.x)*4) + (i2.inner.inner.inner*32)) + i3.inner.inner.inner)] = max(((DepthwiseConv2d[((i2.inner.inner.inner*4) + i3.inner.inner.inner)]*Scale[0]) + Shift[0]), 0.000000f)
}
}
}
As we can see, each thread computes scale_shift and relu before writing the result of depthwise_conv2d to global memory. The fused operator is as fast as single depthwise_conv2d.
Below is the result with Input = [1, 256, 96, 96], Filter = [256, 1, 3, 3], stride = [1, 1], padding = ‘SAME’:
- tf-1.2
depthwise_conv2d: 251.6 us - tf-1.2
depthwise_conv2d+scale_shift+relu(separate): 419.9 us - TVM
depthwise_conv2d: 90.9 us - TVM
depthwise_conv2d + scale_shift + relu(fused): 91.5 us
The advantage of operator fusion is obvious.
This is not the end, TVM can do operator fusion in a smarter way. You may refer to this and read the source code provided below.
Show me the code
- Declare: https://github.com/apache/incubator-tvm/blob/main/topi/python/topi/nn/depthwise_conv2d.py
- Schedule: https://github.com/apache/incubator-tvm/blob/main/topi/python/topi/cuda/depthwise_conv2d.py
- Test: https://github.com/apache/incubator-tvm/blob/main/topi/recipe/conv/depthwise_conv2d_test.py
Acknowledgements
The author has many thanks to Tianqi Chen for his helpful advice and inspiring discussion.
Bio
Yuwei Hu is an intern in Tusimple’s HPC group. He is experiencing a gap year after obtaining a bachelor’s degree in electrical engineering from Beihang University.
References
[1] Xception: Deep Learning with Depthwise Separable Convolutions
[2] MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
[3] Approximate timing for various operations on a typical PC